




1. Դժվարություններ փականի միջուկի հավաքման գործընթացում
Այս ուսումնասիրության մեջ, այլ ավտոմատ հավաքման համակարգերի նախագծման փորձը կլանելուց հետո, վերլուծվել է գոյություն ունեցող կիսաավտոմատ հավաքման համակարգը, և համակարգի մեխանիկական մասը ամբողջությամբ նախագծվել է՝ հիմնվելով սիմուլյացիայի վրա:փականի միջուկհավաքման գործընթաց: Համակարգի նախագծման ծրագրում մենք ձգտում ենք հարմարավետ դարձնել մեխանիկական մասերի մշակումը, նվազագույնի հասցնել ծախսերը, մասերի հավաքումը դարձնել պարզ և հեշտ, և համակարգը որոշակի բացության և ընդարձակելիության ապահովում՝ համակարգի հուսալիությունն ու արդյունավետությունը բարձրացնելու համար: , և լավ հիմք կդնեն համակարգի ծախսերի արդյունավետությունը բարելավելու համար:
ԱյնփականմիջուկըՀավաքման համակարգը իր մեխանիկական կառուցվածքի նախագծով հիմնականում բաժանված է երեք մասի, այն է՝ երկու մոնտաժային մաս՝ աշխատասեղանի վերին ձախ անկյունում, երեք մոնտաժային մասեր՝ ստորին ձախ անկյունում և յոթ հավաքման մասեր՝ աշխատասեղանի մասի աջ կողմում: Երկու մասից բաղկացած հավաքման տեխնիկական դժվարությունը կայանում է նրանում, թե ինչպես ապահովել կնքման օղակի շրջանաձև ձևը: Կտրման գործընթացում այն կենթարկվի սայրի առանցքային արտամղման ուժին, ուստի հեշտ է դեֆորմացնել: Երկրորդ, հավաքման գործընթացում, երբ հայտնաբերվում է միջուկով ձող փոխանցման գործիքային բաղադրիչի վրա, անհրաժեշտ է իրականացնել զննում և հավաքում դռան միջուկի տարբեր բաղադրիչների միջև թրթռման միջոցով: Հետևաբար, յուրաքանչյուր բաղադրիչ ընկնում է համապատասխան դիրքում, որպեսզի դառնա հավաքման օղակ: Գործընթացի դժվարությունը կայանում է նրանում: Վերոնշյալ խնդիրները այս փուլում փականի միջուկի հավաքման մեջ թերի արտադրանքի արագության բարձրացման հիմնական պատճառներն են: Դրա հիման վրա այս փաստաթուղթը օպտիմալացնում է փականի միջուկի հավաքման գործընթացը և ավելացնում է որակի ստուգման համակարգ՝ փականի միջուկի հավաքման որակավորման մակարդակը բարելավելու համար:
2. Խելացի փականի միջուկի հավաքման սխեման
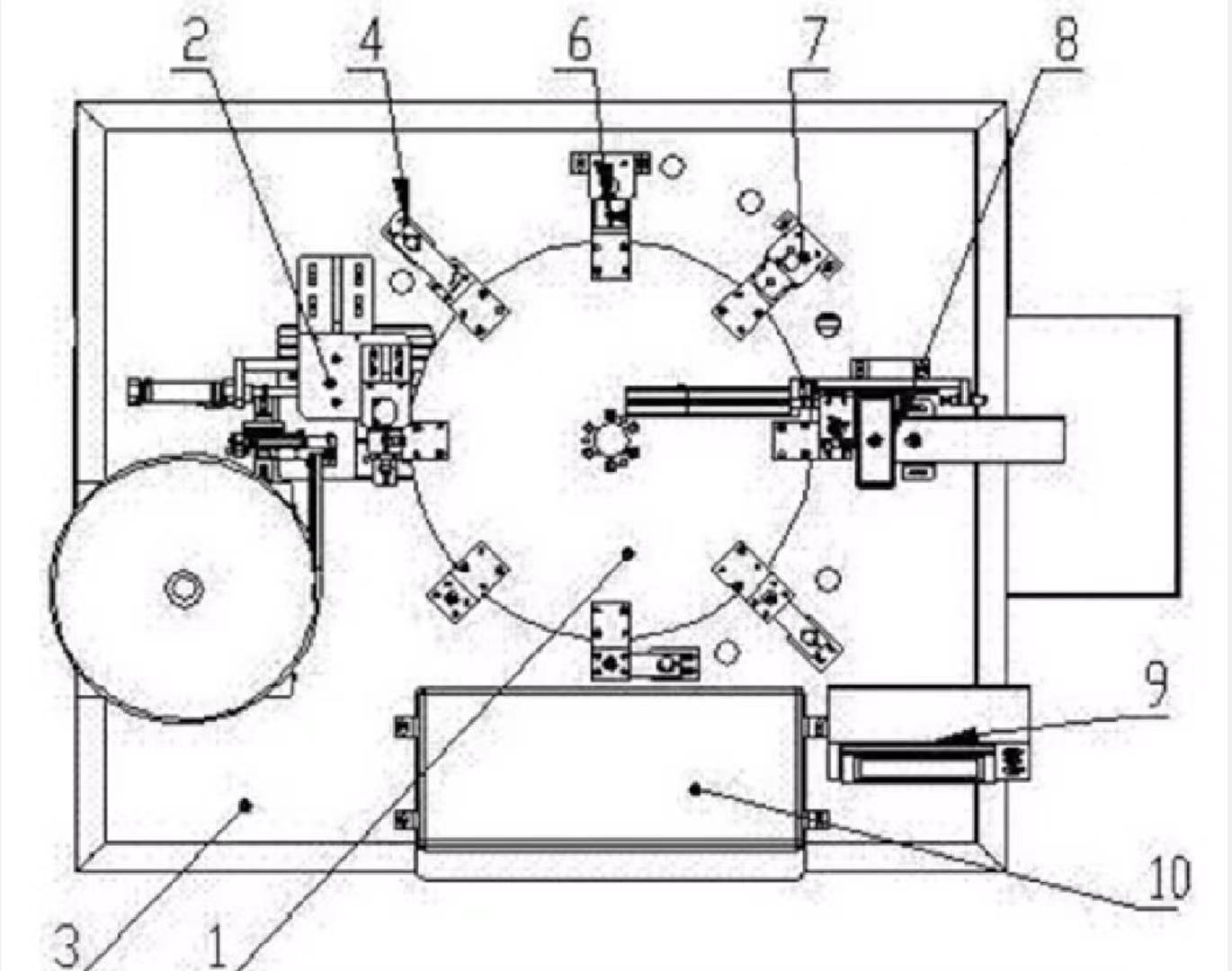
Գործողության ինտերֆեյսը և PLC-ն կազմում են տրամաբանական կառավարման մաս, իսկ հայտնաբերման համակարգը և PLC-ն ունեն երկկողմանի տեղեկատվության հոսք՝ հավաքման համակարգի կարգավիճակի տվյալները հավաքելու և հսկիչ ազդանշան դուրս բերելու համար: Որպես գործադիր մաս, շարժիչ համակարգը ուղղակիորեն վերահսկվում է PLC ելքային մասի կողմից: Բացի սնուցման համակարգից, որը պահանջում է ձեռքով օգնություն, այս համակարգում այլ գործընթացներում իրականացվել է խելացի հավաքում: Մարդ-համակարգիչ լավ փոխազդեցություն է ձեռք բերվում սենսորային էկրանի միջոցով: Հաշվի առնելով մեխանիկական դիզայնում շահագործման հարմարավետությունը՝ դռան միջուկի տեղադրման տուփը կից է սենսորային էկրանին: Հայտնաբերման մեխանիզմը, դռան միջուկի վերևից բացվող փչող բաղադրիչը, փականի միջուկի բարձրության հայտնաբերման բաղադրիչը և փակման մեխանիզմը համապատասխանաբար դասավորված են պտտվող սեղանի գործիքավորման բաղադրիչի շուրջ՝ իրականացնելով դռան միջուկի հավաքման գծի արտադրության դասավորությունը: Հայտնաբերման համակարգը հիմնականում ավարտում է միջուկի ձողերի հայտնաբերումը, տեղադրման բարձրության հայտնաբերումը, որակի ստուգումը և այլն, ինչը ոչ միայն իրականացնում է նյութի ընտրության և փականի միջուկի կողպման ավտոմատացումը, այլև ապահովում է հավաքման գործընթացի կայունությունն ու բարձր արդյունավետությունը: Համակարգի յուրաքանչյուր միավորի կառուցվածքը ներկայացված է Նկար 1-ում.
Ինչպես ցույց է տրված ստորև նկարում, պտտվող սեղանն ամբողջ գործընթացի կենտրոնական օղակն է, և փականի միջուկի հավաքումն ավարտվում է պտտվող սեղանի շարժիչով: Երբ երկրորդ հայտնաբերման մեխանիզմը հայտնաբերում է հավաքվող բաղադրիչը, այն ազդանշան է ուղարկում կառավարման համակարգին, և կառավարման համակարգը համակարգում է յուրաքանչյուր պրոցեսի միավորի աշխատանքը: Նախ, թրթռացող սկավառակը թափահարում է դռան միջուկը և փակում այն ընդունման փականի բերանում: Առաջին հայտնաբերման մեխանիզմը ուղղակիորեն կցուցադրի փականի միջուկները, որոնք հաջողությամբ չեն տեղադրվել որպես վատ նյութեր: Բաղադրիչ 6-ը հայտնաբերում է, թե արդյոք փականի միջուկի օդափոխությունը որակավորված է, և բաղադրիչ 7-ը հայտնաբերում է, թե արդյոք փականի միջուկի տեղադրման բարձրությունը համապատասխանում է ստանդարտին: Միայն այն ապրանքները, որոնք համապատասխանում են վերը նշված երեք հղումներին, կհայտնվեն լավ ապրանքի տուփի մեջ, հակառակ դեպքում դրանք կդիտարկվեն որպես թերի արտադրանք:
-ի խելացի ժողովըփականի միջուկհամակարգի նախագծման տեխնիկական դժվարությունն է: Այս դիզայնում ընդունված է երեք մխոցային դիզայն: Սլայդ մխոցը վերահսկում է արտահոսքը՝ ապահովելու արտահոսքի եզակիությունը. երկրորդ մխոցը ապահովում է, որ կողպեքի ձողը հավասարեցված է արտահոսքի անցքին, այնուհետև համագործակցում է սահող մխոցի հետ՝ ավարտելու փականի միջուկը, որը մտնում է կողպեքի գավազանը, և այնուհետև երկրորդ մխոցը շարունակում է մղել ամբողջ կողպման մեխանիզմը շարժվելու համար, և ներծծող վարդակը կծծի փականը, երբ այն հասնի գործիքին: Ի վերջո, այն բանից հետո, երբ երրորդ մխոցը մղում է փակման մեխանիզմը իր տեղը, սերվո շարժիչը փականի միջուկը ուղարկում է ընդունման փականի բերանը, որպեսզի ավարտի փականի միջուկի հավաքումը: Այս գործընթացը ապահովում է երկայնական և կողային շարժման դիրքերի ճշգրտությունն ու յուրահատկությունը և լավ լուծում է դռան միջուկի հավաքման տեխնիկական դժվարություններին:.
3. Փականների միջուկի հավաքման համակարգի հիմնական բաղադրիչների նախագծում
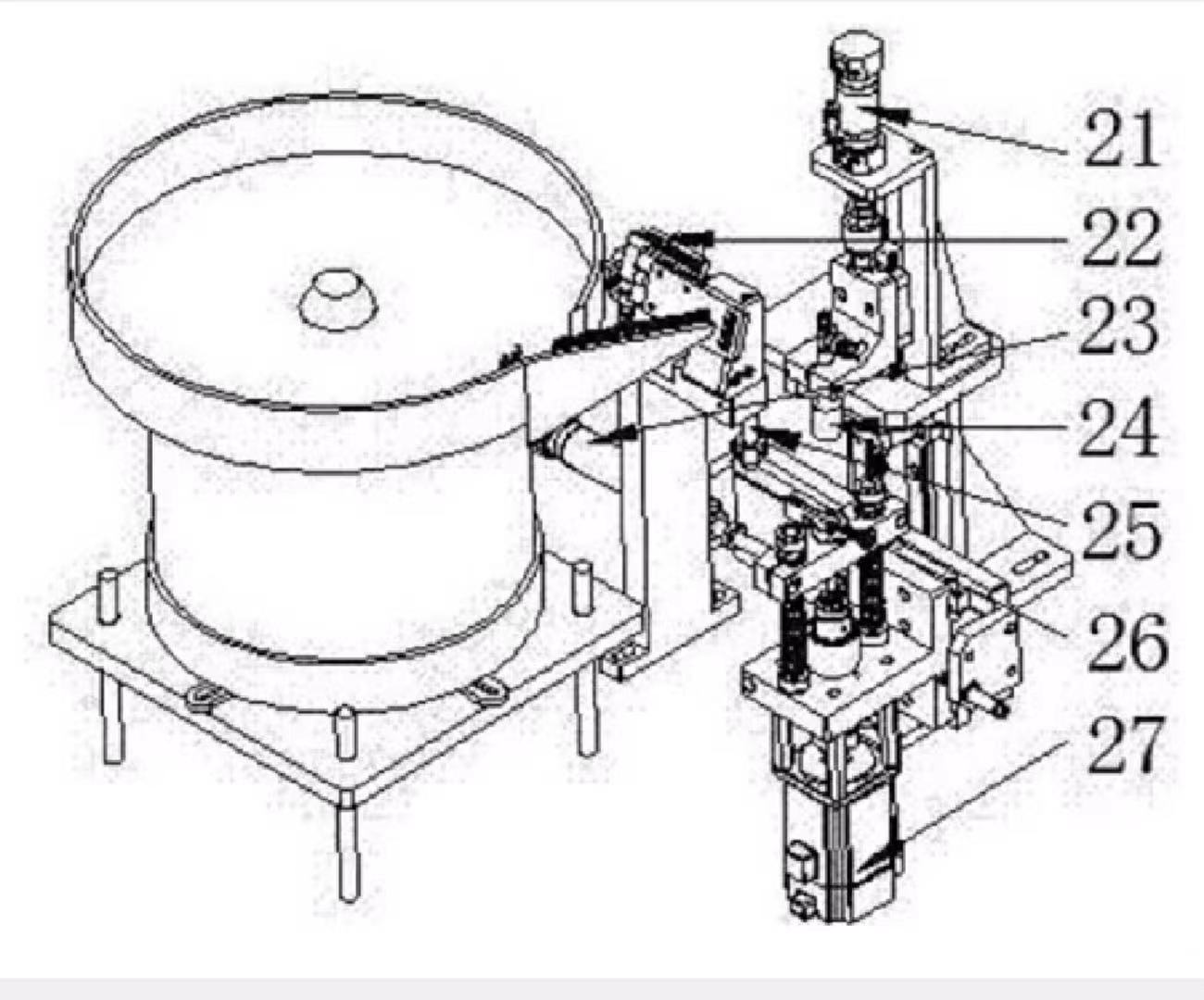
Որպես տեղադրման հիմնական գործընթացփականի միջուկփականի վրա փականի միջուկը փակելը շատ բարձր պահանջներ ունի փականի միջուկի շարժման դիրքի ճշգրտության վերաբերյալ, ուստի այն ավարտելու համար անհրաժեշտ է երկայնական և կողային մեխանիզմների համակարգում: Այս մասի նախագծման մեջ այն տարրալուծվում է մեկ գործողության՝ փականի միջուկի լիցքաթափման գործողության, կողպման լծակի կողպման և փականի միջուկը փականի վարդակի վրա բեռնելու գործողության: Դրա մեխանիկական կառուցվածքը ներկայացված է Նկար 2-ում: Ինչպես երևում է Նկար 2-ից, փականի միջուկի հավաքման մեխանիկական կառուցվածքը բաժանված է երեք մասի: Երեք մասերն աշխատում են համակարգված՝ առանց միմյանց վրա ազդելու: Երբ անկախ գործողությունը ավարտվում է, մխոցը մղում է մեխանիզմը, որպեսզի տեղափոխվի հաջորդ հավաքման դիրքը:
Շարժվող դիրքի ճշգրտությունն ապահովելու համար ընդունված է էլեկտրական հսկողության և մեխանիկական սահմանի համապարփակ ձևավորում՝ 1,4 մմ-ի սահմաններում սխալը վերահսկելու համար: Փականի միջուկը և փականի վարդակի կենտրոնը համակցված են, այնպես որ սերվո շարժիչը կարող է սահուն կերպով փականի միջուկը մղել փականի վարդակի մեջ, հակառակ դեպքում դա վնաս կհասցնի մասերին: Մեխանիկական կառուցվածքի դադարեցումը կամ էլեկտրական ազդանշանների աննորմալ իմպուլսները կարող են չնչին շեղումներ առաջացնել հավաքման աշխատանքներում: Արդյունքում, փականի միջուկը հավաքելուց հետո օդափոխության կատարումը չի համապատասխանում ստանդարտին, և հավաքման բարձրությունը որակավորված չէ, ինչը հանգեցնում է արտադրանքի ձախողման: Այս գործոնը լիովին հաշվի է առնվում համակարգի նախագծման մեջ, օդի հարվածի և բարձրության հայտնաբերումն օգտագործվում է վատ ապրանքները տեսակավորելու համար.
Հրապարակման ժամանակը` 09-09-2022
