




1. Դժվարություններ փականի միջուկի հավաքման գործընթացում
Այս ուսումնասիրության մեջ, այլ ավտոմատ հավաքման համակարգերի նախագծման փորձը յուրացնելուց հետո, վերլուծվել է առկա կիսաավտոմատ հավաքման համակարգը, և համակարգի մեխանիկական մասը ամբողջությամբ նախագծվել է սիմուլյացիայի հիման վրա։փականի միջուկՀավաքման գործընթաց։ Համակարգի նախագծման ծրագրում մենք ձգտում ենք մեխանիկական մասերի մշակումը դարձնել հարմար, նվազագույնի հասցնել ծախսերը, մասերի հավաքումը դարձնել պարզ և հեշտ, ինչպես նաև համակարգը դարձնել որոշակի աստիճանի բաց և ընդարձակելի՝ համակարգի հուսալիությունն ու արդյունավետությունը բարձրացնելու և լավ հիմք դնելու համակարգի ծախսարդյունավետությունը բարելավելու համար։
TheփականմիջուկՀավաքման համակարգը իր մեխանիկական կառուցվածքի առումով հիմնականում բաժանված է երեք մասի՝ աշխատանքային սեղանի վերին ձախ անկյունում գտնվող երկու հավաքման մասեր, ստորին ձախ անկյունում գտնվող երեք հավաքման մասեր և աշխատանքային սեղանի մասի աջ կողմում գտնվող յոթ հավաքման մասեր։ Երկմաս հավաքման տեխնիկական դժվարությունը կայանում է կնքման օղակի շրջանաձև ձևն ապահովելու մեջ։ Կտրման գործընթացում այն ենթարկվում է շեղբի առանցքային արտամղման ուժին, ուստի այն հեշտությամբ դեֆորմացվում է։ Երկրորդ, հավաքման գործընթացի ընթացքում, երբ փոխանցման գործիքային բաղադրիչի վրա հայտնաբերվում է միջուկով ձող, անհրաժեշտ է իրականացնել դռան միջուկի տարբեր բաղադրիչների միջև զտում և հավաքում թրթռման միջոցով։ Հետևաբար, յուրաքանչյուր բաղադրիչ ընկնում է համապատասխան դիրքում՝ դառնալով հավաքման օղակ։ Գործընթացի դժվարությունը կայանում է նրանում, որ վերը նշված խնդիրները այս փուլում փականի միջուկի հավաքման մեջ թերի արտադրանքի մակարդակի աճի հիմնական պատճառներն են։ Դրա հիման վրա այս հոդվածը օպտիմալացնում է փականի միջուկի հավաքման գործընթացը և ավելացնում որակի ստուգման համակարգ՝ փականի միջուկի հավաքման որակավորման մակարդակը բարելավելու համար։
2. Խելացի փականի միջուկի հավաքման սխեմա
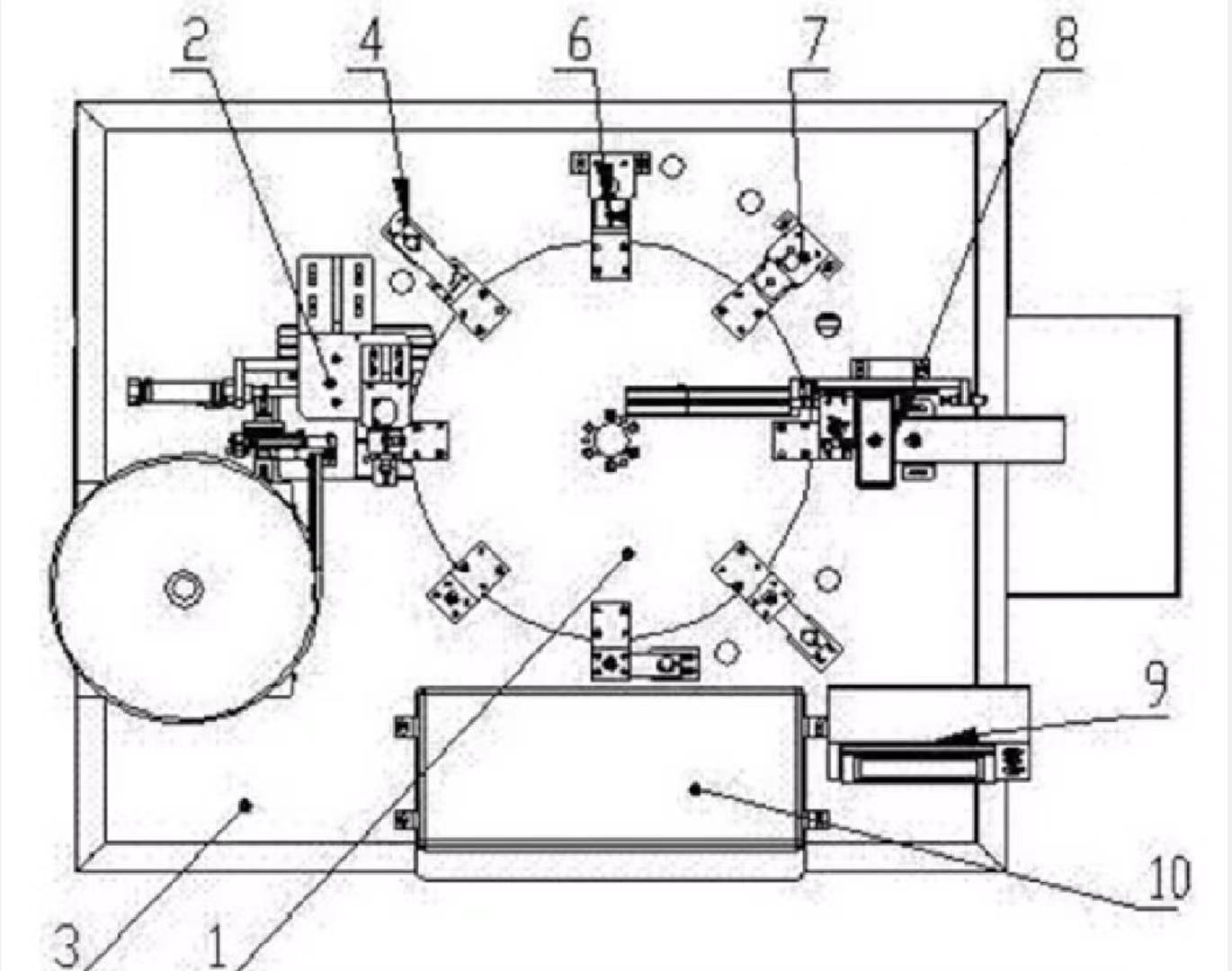
Գործողության ինտերֆեյսը և PLC-ն կազմում են տրամաբանական կառավարման մաս, իսկ հայտնաբերման համակարգը և PLC-ն ունեն երկկողմանի տեղեկատվական հոսք՝ հավաքման համակարգի վիճակի տվյալները հավաքելու և կառավարման ազդանշանը արտածելու համար: Որպես գործադիր մաս, շարժիչ համակարգը անմիջականորեն կառավարվում է PLC-ի ելքային մասով: Բացի սնուցման համակարգից, որը պահանջում է ձեռքով օգնություն, այս համակարգի մյուս գործընթացներն իրականացրել են ինտելեկտուալ հավաքում: Մարդ-համակարգիչ լավ փոխազդեցություն է ապահովվում սենսորային էկրանի միջոցով: Հաշվի առնելով մեխանիկական դիզայնի շահագործման հարմարավետությունը, դռան միջուկի տեղադրման տուփը հարակից է սենսորային էկրանին: Հայտնաբերման մեխանիզմը, դռան միջուկի վերին բացման փչող բաղադրիչը, փականի միջուկի բարձրության հայտնաբերման բաղադրիչը և փակման մեխանիզմը համապատասխանաբար դասավորված են պտտվող սկավառակի գործիքային բաղադրիչի շուրջ՝ իրականացնելով դռան միջուկի հավաքման գծի արտադրական դասավորությունը: Հայտնաբերման համակարգը հիմնականում կատարում է միջուկի ձողի հայտնաբերումը, տեղադրման բարձրության հայտնաբերումը, որակի ստուգումը և այլն, ինչը ոչ միայն իրականացնում է նյութի ընտրության և փականի միջուկի կողպեքի ավտոմատացումը, այլև ապահովում է հավաքման գործընթացի կայունությունը և բարձր արդյունավետությունը: Համակարգի յուրաքանչյուր միավորի կառուցվածքը ներկայացված է նկար 1-ում:.
Ինչպես ցույց է տրված ստորև բերված նկարում, պտտվող սկավառակը ամբողջ գործընթացի կենտրոնական օղակն է, և փականի միջուկի հավաքումն ավարտվում է պտտվող սկավառակի շարժիչով: Երբ երկրորդ հայտնաբերման մեխանիզմը հայտնաբերում է հավաքվող բաղադրիչը, այն ազդանշան է ուղարկում կառավարման համակարգին, և կառավարման համակարգը համակարգում է յուրաքանչյուր գործընթացային միավորի աշխատանքը: Նախ, թրթռացող սկավառակը թափահարում է դռան միջուկը և ամրացնում այն մուտքային փականի բերանում: Առաջին հայտնաբերման մեխանիզմը ուղղակիորեն կզտի այն փականի միջուկները, որոնք հաջողությամբ չեն տեղադրվել, որպես վատ նյութեր: Բաղադրիչ 6-ը հայտնաբերում է, թե արդյոք փականի միջուկի օդափոխությունը որակավորված է, իսկ բաղադրիչ 7-ը՝ հայտնաբերում է, թե արդյոք փականի միջուկի տեղադրման բարձրությունը համապատասխանում է ստանդարտին: Միայն վերը նշված երեք օղակներում որակավորված ապրանքները կտեղադրվեն լավ ապրանքի տուփի մեջ, հակառակ դեպքում դրանք կդիտարկվեն որպես թերի ապրանքներ:
Խելացի ժողովըփականի միջուկՀամակարգի նախագծման տեխնիկական դժվարությունն է։ Այս նախագծում ընդունվում է երեք մխոցանի նախագծում։ Սահող մխոցը վերահսկում է արտանետումը՝ արտանետման եզակիությունն ապահովելու համար. երկրորդ մխոցը ապահովում է, որ կողպեքի ձողը համապատասխանի արտանետման անցքին, ապա համագործակցում է սահող մխոցի հետ՝ փականի միջուկը կողպեքի ձողի մեջ մտցնելու համար, ապա երկրորդ մխոցը շարունակում է մղել ամբողջ կողպեքի մեխանիզմը՝ շարժվելու համար, և ներծծող ծայրակալը կներծծի փականը, երբ այն հասնի գործիքի հատակին։ Վերջապես, երբ երրորդ մխոցը կողպեքի մեխանիզմը իր տեղը դնի, սերվոշարժիչը փականի միջուկը ուղարկում է մուտքային փականի բերան՝ փականի միջուկի հավաքումն ավարտելու համար։ Այս գործընթացը ապահովում է երկայնական և լայնական շարժման դիրքերի ճշգրտությունն ու եզակիությունը և լավ լուծում է դռան միջուկի հավաքման տեխնիկական դժվարությունների համար։.
3. Փականի միջուկի հավաքման համակարգի հիմնական բաղադրիչների նախագծում
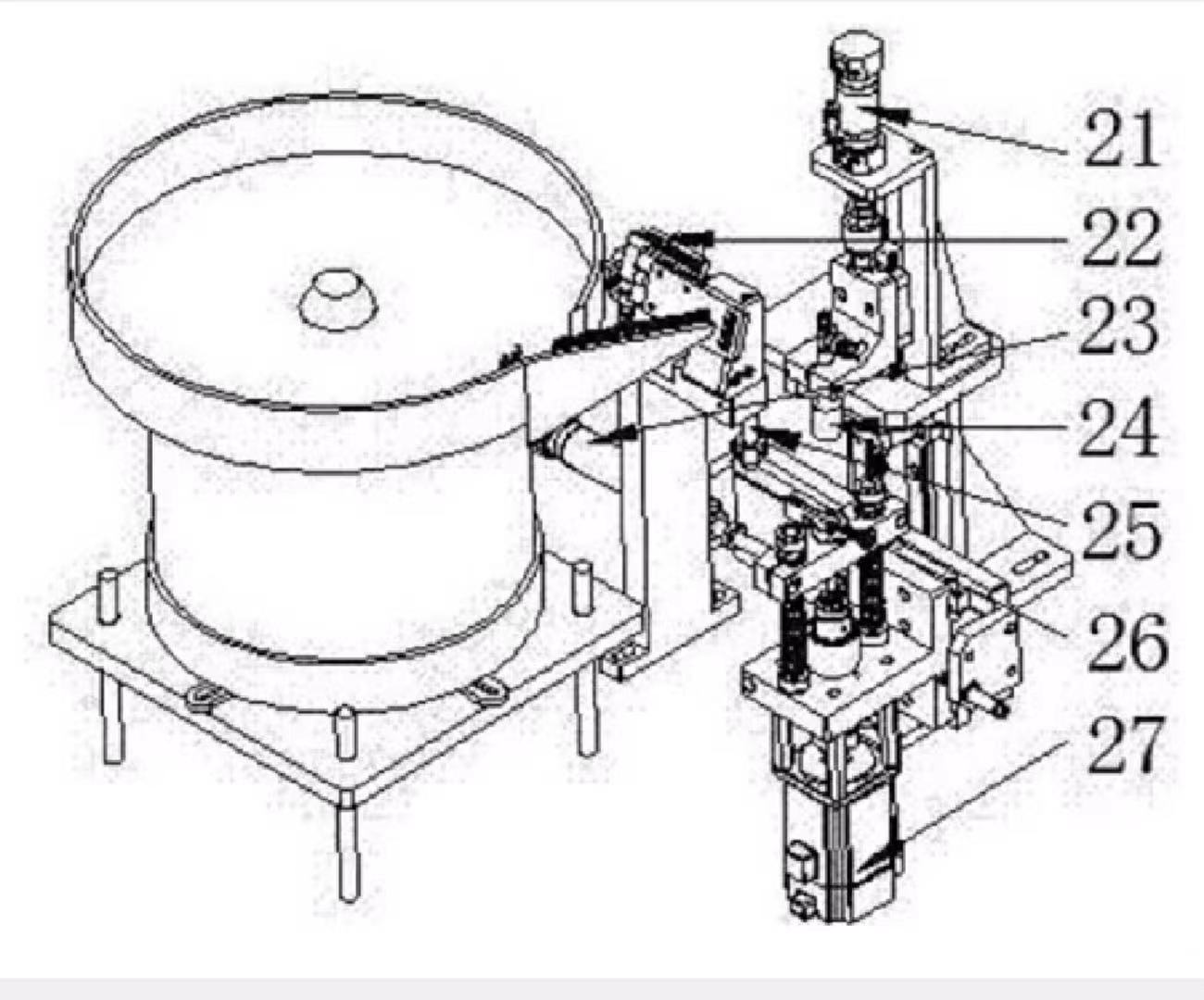
Որպես տեղադրման հիմնական գործընթաց՝փականի միջուկՓականի վրա փականի միջուկի կողպումը շատ բարձր պահանջներ ունի փականի միջուկի շարժման դիրքի ճշգրտության վերաբերյալ, ուստի այն ավարտելու համար անհրաժեշտ է երկայնական և կողմնային մեխանիզմների համակարգումը: Այս մասի նախագծման մեջ այն բաժանված է մեկ գործողության՝ փականի միջուկի լիցքաթափման գործողության, կողպող լծակի կողպման գործողության և փականի միջուկը փականի ծայրակալի վրա բեռնելու գործողության: Դրա մեխանիկական կառուցվածքը ցույց է տրված նկար 2-ում: Ինչպես երևում է նկար 2-ից, փականի միջուկի հավաքման մեխանիկական կառուցվածքը բաժանված է երեք մասի: Երեք մասերը աշխատում են համակարգված՝ առանց միմյանց վրա ազդելու: Երբ անկախ գործողությունն ավարտվում է, գլանը մղում է մեխանիզմը՝ հաջորդ հավաքման դիրքը տեղափոխվելու համար:
Շարժման դիրքի ճշգրտությունն ապահովելու համար ընդունվում է էլեկտրական կառավարման և մեխանիկական սահմանաչափի համապարփակ նախագծում՝ 1.4 մմ սխալը վերահսկելու համար: Փականի միջուկը և փականի ծորակի կենտրոնը համակցված են, որպեսզի սերվոշարժիչը կարողանա սահուն մղել փականի միջուկը փականի ծորակի մեջ, հակառակ դեպքում դա կվնասի մասերը: Մեխանիկական կառուցվածքի կանգառը կամ էլեկտրական ազդանշանների աննորմալ իմպուլսները կարող են փոքր շեղումներ առաջացնել հավաքման աշխատանքներում: Արդյունքում, փականի միջուկը հավաքելուց հետո օդափոխության աշխատանքը չի համապատասխանում ստանդարտներին, և հավաքման բարձրությունը չի համապատասխանում պահանջներին, ինչը հանգեցնում է արտադրանքի խափանմանը: Այս գործոնը լիովին հաշվի է առնվում համակարգի նախագծման մեջ, օդի փչման հայտնաբերումը և բարձրության հայտնաբերումը օգտագործվում են վատ արտադրանքը տեսակավորելու համար:.
Հրապարակման ժամանակը. Սեպտեմբեր-09-2022
