




Մանրամասն քննարկում Խելացի փականի միջուկի հավաքման համակարգի նախագծման և հետազոտության վերաբերյալ
Ներածություն
Քանի որ հավաքման համակարգը արտադրական գիծ է և խելացի արտադրական միավոր, խելացի կառավարման տեխնոլոգիայի շարունակական բարելավմամբ և վերամշակման բարելավմամբ, դրա ավտոմատացման աստիճանը շարունակում է աճել:Ավարտել.Փականի միջուկի կառավարման խելացի հավաքման համակարգը, որը նախագծված է այս հոդվածում, իրականացնում է նյութի ընտրության և փականի կողպման հիմնական ավտոմատացումը, իսկ թերի արտադրանքները ինտեգրվում են հայտնաբերման համակարգին՝ հավաքը տեսակավորելու համար:Համակարգն իրականացնելու համար ընդունեք PLC և մարդ-մեքենա ինտերֆեյսը, և մեխանիկական կառուցվածքը նախագծված է և ողջամիտ:Այս համակարգի նախագծման ավարտը մեծապես բարելավում է արտադրության արդյունավետությունըփականի միջուկըտեղադրված է փականի վրա և օրինակ է տալիս այս տեսակի համակարգի կառուցման համար:
Թվի արագ աճովփականի մասեր, օդի ծավալը շարունակում է մեծանալ, դա այն աստիճանն է, որով ավտոմատ վարող մեքենան գտնվում է դռան վրա, իսկ դռան վրա գտնվող մեքենայի միջուկը ավելի ու ավելի հաճախակի է լինում, և դուռը չի կարող կողպվել։Կարելի է իրականացնել խելացի հայտնաբերման գործառույթը Խելացի մոդուլը կարող է իրականացնել խելացի խնդիրը խելացի մոդուլի վրա [1]:Բարելավել արտադրության արդյունավետությունը և լավ դրույքաչափը:
1. Փականի միջուկի և դրա հավաքման գործընթացի դժվարության վերլուծություն
Այս ուսումնասիրության մեջ, այլ ավտոմատ հավաքման համակարգերի նախագծման փորձը կլանելուց հետո, վերլուծվել է գոյություն ունեցող կիսաավտոմատ հավաքման համակարգը, և համակարգի մեխանիկական մասը ամբողջությամբ նախագծվել է փականի միջուկի հավաքման գործընթացի մոդելավորման հիման վրա:Համակարգի նախագծման ծրագրում մենք ձգտում ենք հարմարավետ դարձնել մեխանիկական մասերի մշակումը, նվազագույնի հասցնել ծախսերը, մասերի հավաքումը դարձնել պարզ և հեշտ, և համակարգը որոշակի բացության և ընդարձակելիության ապահովում՝ հուսալիությունը բարձրացնելու համար: և համակարգի արդյունավետությունը։, և լավ հիմք կդնեն համակարգի ծախսերի արդյունավետությունը բարելավելու համար:
Փականի միջուկի հավաքման համակարգԻր մեխանիկական կառուցվածքի ձևավորման առումով հիմնականում բաժանված է երեք մասի, այն է՝ երկու մոնտաժային մաս՝ աշխատասեղանի վերին ձախ անկյունում, երեք մոնտաժային մասեր՝ ստորին ձախ անկյունում և յոթ հավաքման մասեր՝ աշխատասեղանի մասի աջ կողմում:Երկու մասից բաղկացած հավաքման տեխնիկական դժվարությունը կայանում է նրանում, թե ինչպես ապահովել կնքման օղակի շրջանաձև ձևը:Կտրման գործընթացում այն կենթարկվի սայրի առանցքային արտամղման ուժին, ուստի հեշտ է դեֆորմացնել:Երկրորդ, հավաքման գործընթացում, երբ հայտնաբերվում է միջուկով ձող փոխանցման գործիքային բաղադրիչի վրա, անհրաժեշտ է իրականացնել զննում և հավաքում դռան միջուկի տարբեր բաղադրիչների միջև թրթռման միջոցով:Հետևաբար, յուրաքանչյուր բաղադրիչ ընկնում է համապատասխան դիրքում, որպեսզի դառնա հավաքման օղակ:Գործընթացի դժվարությունը կայանում է նրանում.Վերոնշյալ խնդիրները այս փուլում փականի միջուկի հավաքման մեջ թերի արտադրանքի արագության բարձրացման հիմնական պատճառներն են:Դրա հիման վրա այս փաստաթուղթը օպտիմալացնում է փականի միջուկի հավաքման գործընթացը և ավելացնում է որակի ստուգման համակարգ՝ փականի միջուկի հավաքման որակավորման մակարդակը բարելավելու համար:
2. Փականի միջուկի խելացի համակարգի ձևավորում փականի բերանի վրա
-
2.1 Խելացի փականի միջուկի հավաքման սխեմայի ձևավորում
Գործողության ինտերֆեյսը և PLC-ն կազմում են տրամաբանական կառավարման մաս, իսկ հայտնաբերման համակարգը և PLC-ն ունեն երկկողմանի տեղեկատվության հոսք՝ հավաքման համակարգի կարգավիճակի տվյալները հավաքելու և հսկիչ ազդանշան դուրս բերելու համար:Որպես գործադիր մաս, շարժիչ համակարգը ուղղակիորեն վերահսկվում է PLC ելքային մասի կողմից:Բացի սնուցման համակարգից, որը պահանջում է ձեռքով օգնություն, այս համակարգում այլ գործընթացներում իրականացվել է խելացի հավաքում:Մարդ-համակարգիչ լավ փոխազդեցություն է ձեռք բերվում սենսորային էկրանի միջոցով:Հաշվի առնելով մեխանիկական դիզայնում շահագործման հարմարավետությունը՝ դռան միջուկի տեղադրման տուփը կից է սենսորային էկրանին:Հայտնաբերման մեխանիզմը, դռան միջուկի վերևից բացվող փչող բաղադրիչը, փականի միջուկի բարձրության հայտնաբերման բաղադրիչը և փակման մեխանիզմը համապատասխանաբար դասավորված են պտտվող սեղանի գործիքավորման բաղադրիչի շուրջ՝ իրականացնելով դռան միջուկի հավաքման գծի արտադրության դասավորությունը:Հայտնաբերման համակարգը հիմնականում ավարտում է միջուկի ձողերի հայտնաբերումը, տեղադրման բարձրության հայտնաբերումը, որակի ստուգումը և այլն, ինչը ոչ միայն իրականացնում է նյութի ընտրության և փականի միջուկի կողպման ավտոմատացումը, այլև ապահովում է հավաքման գործընթացի կայունությունն ու բարձր արդյունավետությունը:Համակարգի յուրաքանչյուր միավորի կառուցվածքը ներկայացված է հետևյալ նկարում.

Ինչպես ցույց է տրված Նկար 1-ում, պտտվող սեղանը ամբողջ գործընթացի հոսքի կենտրոնական օղակն է, և փականի միջուկի հավաքումն ավարտվում է պտտվող սեղանի շարժիչով:Երբ երկրորդ հայտնաբերման մեխանիզմը հայտնաբերում է հավաքվող բաղադրիչը, այն ազդանշան է ուղարկում կառավարման համակարգին, և կառավարման համակարգը համակարգում է յուրաքանչյուր պրոցեսի միավորի աշխատանքը:Նախ, թրթռացող սկավառակը թափահարում է դռան միջուկը և փակում այն ընդունման փականի բերանում:Առաջին հայտնաբերման մեխանիզմը ուղղակիորեն կցուցադրի փականի միջուկները, որոնք հաջողությամբ չեն տեղադրվել որպես վատ նյութեր:Բաղադրիչ 6-ը հայտնաբերում է, թե արդյոք փականի միջուկի օդափոխությունը որակավորված է, և բաղադրիչ 7-ը հայտնաբերում է, թե արդյոք փականի միջուկի տեղադրման բարձրությունը համապատասխանում է ստանդարտին:Միայն այն ապրանքները, որոնք համապատասխանում են վերը նշված երեք քայլերին, կընտրվեն լավ ապրանքի տուփի մեջ, հակառակ դեպքում դրանք կդիտարկվեն որպես թերի արտադրանք:
2.2 Փականների միջուկի հավաքման համակարգի հիմնական բաղադրիչների նախագծում
Որպես փականի վրա փականի միջուկի տեղադրման հիմնական գործընթացը, փականի միջուկը փակելը շատ բարձր պահանջներ ունի փականի միջուկի շարժման դիրքի ճշգրտության վերաբերյալ, ուստի այն ավարտելու համար անհրաժեշտ է երկայնական և կողային մեխանիզմների համակարգում:Այս մասի նախագծման մեջ այն տարրալուծվում է մեկ գործողության՝ փականի միջուկի լիցքաթափման գործողության, կողպման լծակի կողպման և փականի միջուկը փականի վարդակի վրա բեռնելու գործողության:Դրա մեխանիկական կառուցվածքը ներկայացված է Նկար 2-ում:
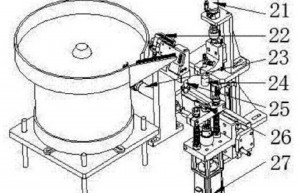
Ինչպես երևում է Նկար 2-ից, փականի միջուկի հավաքման մեխանիկական կառուցվածքը բաժանված է երեք մասի.Երեք մասերն աշխատում են համակարգված՝ առանց միմյանց վրա ազդելու:Երբ անկախ գործողությունը ավարտվում է, մխոցը մղում է մեխանիզմը, որպեսզի տեղափոխվի հաջորդ հավաքման դիրքը:Շարժվող դիրքի ճշգրտությունն ապահովելու համար ընդունված է էլեկտրական հսկողության և մեխանիկական սահմանի համապարփակ ձևավորում՝ 1,4 մմ-ի սահմաններում սխալը վերահսկելու համար:Փականի միջուկը և փականի վարդակի կենտրոնը համակցված են, այնպես որ սերվո շարժիչը կարող է սահուն կերպով փականի միջուկը մղել փականի վարդակի մեջ, հակառակ դեպքում դա վնաս կհասցնի մասերին:
Մեխանիկական կառուցվածքի դադարեցումը կամ էլեկտրական ազդանշանների աննորմալ իմպուլսները կարող են չնչին շեղումներ առաջացնել հավաքման աշխատանքներում:Արդյունքում, փականի միջուկը հավաքելուց հետո օդափոխության կատարումը չի համապատասխանում ստանդարտին, և հավաքման բարձրությունը որակավորված չէ, ինչը հանգեցնում է արտադրանքի ձախողման:Այս գործոնը լիովին հաշվի է առնվում համակարգի նախագծման մեջ, օդի հարվածի և բարձրության հայտնաբերումն օգտագործվում է վատ ապրանքները տեսակավորելու համար:
2.3 Փականների միջուկի հավաքման կառավարման համակարգի նախագծում
Այս դիզայնի կառավարման համակարգը հիմնականում ներառում է PLC տրամաբանական կառավարում, servo շարժիչի շարժիչ համակարգ, հայտնաբերման համակարգ և HMI մարդ-մեքենա ինտերֆեյս:Servo drive համակարգը հիմնականում բաղկացած է սերվո շարժիչից, ռեդուկտորից և այլն, որոնք ազդանշանը ստանալուց հետո մղում են մեխանիկական մասերի շարժմանը:Սերվո համակարգը կարող է իրականացնել ճշգրիտ դիրքավորում և արագության ճշգրտում PLC-ի հսկողության ներքո:Հայտնաբերման համակարգը ներառում է ֆոտոէլեկտրական սենսորներ, լույսի սենսորներ, լազերային սենսորներ և այլն, որոնք հիմնականում իրականացնում են դիրքավորման հայտնաբերման, մասերի հայտնաբերման և նույնականացման և գործընթացի հաջորդականության համապատասխանության գործառույթները:HIM մարդ-մեքենա ինտերֆեյսը ընդունում է գրաֆիկական ծրագրավորման մոդուլ, որը կարող է իրականացնել մարդ-մեքենա լավ փոխազդեցություն:Օպերատորը կարող է ուղղակիորեն կառավարել համակարգը գործառնական ինտերֆեյսի միջոցով, իսկ հավաքման գործընթացը և պարամետրերը կարող են ցուցադրվել նաև ուղղակիորեն ինտերֆեյսի միջոցով:
Համակարգը կարող է ընտրել ձեռքով հավաքման ռեժիմ և ավտոմատ հավաքման ռեժիմ՝ շահագործման ինտերֆեյսի միջոցով:Ավտոմատ ռեժիմում համակարգը ավտոմատ կերպով հավաքվում է ըստ հավաքման գործընթացի:Ձեռնարկի շահագործման ռեժիմում համակարգը աշխատում է մեկ քայլով, և յուրաքանչյուր գործողության գործողություն անընդհատ չի գործարկվի:Համակարգային ծրագրի կատարումը սկսվում է պտտվող սեղանի պտտման ենթացանցից, PLC-ն թողարկում է հսկիչ ազդանշանի կառավարումը, իսկ սերվո շարժիչը մղում է սկավառակի բեռնումը և ռոտացիան:Երբ պտտվող սեղանը փականի միջուկը տեղափոխում է համապատասխան տեխնոլոգիական գործընթացի դիրքը, գործարկվում է տեխնոլոգիական գործընթացի ենթակարգը, և կատարման բաղադրիչը կատարում է համապատասխան գործողությունը՝ համաձայն հսկիչ ազդանշանի:
3. Ավարտ
Փականի միջուկի տեղադրման գործընթացի ընթացքըփականըբարդ չէ, բայց գործընթացի կատարելագործման պահանջները համեմատաբար բարձր են:Հետեւաբար, ձեռքով հավաքումը եւ կիսաավտոմատ հավաքումը հիմնականում օգտագործվում են արդյունաբերական արտադրության մեջ, եւ դրանց կատարումը եւ որակը անկայուն են:Այս հոդվածում նախագծված է փականի վրա տեղադրված փականի միջուկի խելացի հավաքման համակարգ, որն իրականացնում է նյութի ընտրության և փականի միջուկի կողպման ավտոմատացումը և հայտնաբերման համակարգի միջոցով հայտնաբերում է օդափոխության աշխատանքը և փականի միջուկի տեղադրման բարձրությունը, և հայտնաբերման արդյունքները ավտոմատ կերպով վերբեռնվում են կառավարման համակարգ՝ թերի արտադրանքի ավտոմատ տեսակավորումն իրականացնելու համար:Բարելավվել են փականի վարդակին տեղադրված փականի միջուկի աշխատանքային արդյունավետությունը և արտադրանքի կայունությունը:
Գրեք ձեր հաղորդագրությունը այստեղ և ուղարկեք այն մեզ





